
PAST COMPETITION ROBOTS
FIRST Rebuilt (2026)

FIRST Reefscape (2025)
Nickname: Sharkbait
The objective of Reefscape was to remove balls from a rack of vertical rods and replace them with hollow cylinders. Spheres could also be scored in low goals for human players to throw into a long, narrow net over the field. At the end of the game, robots had to hold onto and climb a cage, which could be set up at a lower height (making it more difficult to climb) for extra points. Our robot, Sharkbait, excelled at placing the cylindrical game pieces on the top rack, which made it a high scorer. Sharkbait, with its swerve drive, moved very quickly around the field and, by being able to quickly move either kind of game piece, could complement any team.

FIRST Cresendo (2024)
Nickname: Tempo
The objective of Crescendo was to shoot large rings into a high slot while depositing others in a lower slot that boosted the points from the more difficult high goal. There were also human players who had to throw the rings onto posts high up in the center of the field, and a challenge at the end for the robots to climb a horizontal chain, with additional points awarded for sharing the chain with other robots from their team. Our robot, Tempo, had one system combining intake and shooting that, combined with a swerve drive, enabled it to shuffle game pieces around the field, obstruct other teams’ robots, and score many points back-to-back.
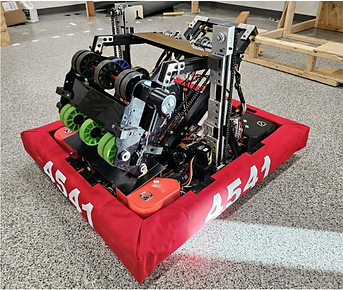
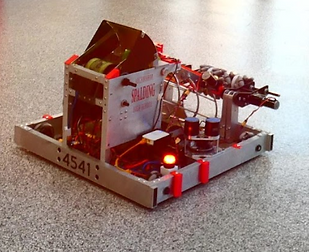
FIRST Charged Up (2023)
Nickname: Kelvin
The objective of Charged Up was to place cubes and cones on wide rows of progressively higher rods, with the opportunity to coordinate with the opposing team to each gain more points. Each match ended with the incredibly difficult task of balancing up to three robots together on a narrow and shifting see-saw. Our robot, Kelvin, featured our first full swerve chassis, along with both a fast intake and a powerful claw for moving game pieces. Kelvin was fast and efficient during the majority of the game, but also capable of balancing very well on the see-saw at the end.

FIRST Rapid React (2022)
Nickname: Jankins
The objective of Rapid React was to place balls in a basket or launch them into a much higher one, and to climb higher rungs successively. Rapid React also encouraged defensive play by creating areas on each side where a team could aim their robot, immune from the other team’s bots blocking or moving them.
Our robot, Jankins, revived our team after the COVID years. Its shooting and defense made it a high scorer, but its climbing was absolutely exceptional.
FIRST Infinite Recharge 21 (2021)

Nickname: MIG
The objective of Infinite Recharge 21 was to launch or place small balls in goals mounted high and low on the walls of the field. Robots also had to spin a colored wheel a certain number of times or to a certain color, then reach up and hang alongside a teammate from a hanging see-saw. Although our robot, MIG, was unable to compete due to the ongoing pandemic, building it significantly enhanced our team’s design skills. MIG, with our first-ever swerve drive system and a very fast shooter, had such fluid movement that we displayed it at outreach and school events for years after, starting a tradition of maintaining and reusing robots.
FIRST Infinite Recharge (2020)
Nickname: Kronk
The objective of Infinite Recharge was to launch or place small balls in goals mounted high and low on the walls of the field. Robots also had to spin a colored wheel a certain number of times or to a certain color, then reach up and hang alongside a teammate from a hanging see-saw. Our robot, Kronk, alongside its gamepiece capabilities, had a tank drivetrain that made it great at blocking opposing robots from completing their tasks.

FIRST Destination Deep Space (2019)
Nickname: Geoff
The objective of Destination Deep Space was to complete the team's spacecraft and cargo ship using disc-shaped panels, then launch or place balls in these completed spaces, and, finally, climb a podium. Our robot, Geoff, had a powerful, shape-optimized polycarbonate grabber with a pneumatic claw that moved the discs and balls. Like Fahrenheit from the year prior, Geoff had a shifting gearbox drivetrain and an elevator system that could reach all levels of the spacecraft.

FIRST Power Up (2018)
Nickname: Fahrenheit
The objective of Power Up was to place large cubes on three different scales, one of which was in the air, to weigh them to one’s team’s side. Our robot, Fahrenheit, had a carbon fiber grabber mounted on a cascading elevator, which was operated with proportional-integral-derivative controllers. Its drivetrain ran on a shifting gearbox that supplied more torque when necessary, while allowing for more power-efficient movement. Topped off by a climber and pre-programmed with ten different paths for the autonomous phase, Fahrenheit was our best-performing robot yet.
FIRST Steamworks (2017)
Nickname: Bruce
The objective of Steamworks was to launch wiffle balls into tall baskets and bring gears to a team “airship.” If enough gears are added to the airship, ropes are deployed for the robots to climb.
Our robot, Bruce, was instantly recognizable on the field due to its colorful LEDs and its ability to climb the rope in just two seconds. This climber, combined with 100% consistent gear placement, made Bruce iconic.


FIRST Stronghold (2016)
Nickname: Finnegan
The objective of Stronghold was to launch boulders into a castle and later climb the wall. This game was unique for its changing midfield obstacles, called “defenses.”Our dragon-themed robot, Finnegan, was able to traverse category A, B, and D defenses and shoot for high and low goals. This jack-of-all-trades approach was supported by its dual-motor intake and shooting system.
FIRST Recycle Rush (2015)
Nickname: King Charles
The objective of Recycle Rush was to gather and stack recycling bins, then place them in stacks, and finally, place a trash can on top of the stacks. King Charles was able to dominate the local events and ultimately won the Chesapeake District Championships. During this season, our team traveled to St. Louis and competed in the FIRST World Championships!


FIRST Aerial Assist (2014)
Nickname: Kevin
The objective of Aerial Assist was to pass 2ft yoga balls between robots and then launch them into wall goals. Our robot, Kevin, had an intake that used a direct motor mount to a high-torque axle system that picked the ball up and loaded it into an aluminum loop connected to a 12" bore pneumatic. With its bright colors, accurate shooter, and effective intake, Kevin was instantly recognizable on the field.

FIRST Ultimate Ascent (2013)
Nickname: Horton
The objective of Ultimate Ascent was to throw Frisbees into gaps above the drivers. To end the game, the robots had to climb a pyramid-shaped jungle gym on the field. Our robot Horton used a single active arm to lift its 110-pound frame up the pyramid. It rested on two passive hooks before climbing each rung, and used a winch and spring system that extended its nearly 3ft arm out to each one.

T-Shirt Cannon
Nickname: Beef Bot
For years now, our team’s T-shirt cannon has been a symbol of fame and school spirit for Archbishop Spalding. What started out as an off-season, for-fun pet project has turned into the de-facto representation of our team at our school. Over time, it has evolved and grown with our team, starting from a jumbled mess of cables barely held together by its case to the refined, colorful, flashy design that we see today at almost every school event. With a mecanum drive train, twin batteries, a brand-new pneumatics system, and a lighting scheme better than any concert on Earth, it’s absolutely stunning what it has morphed into.





